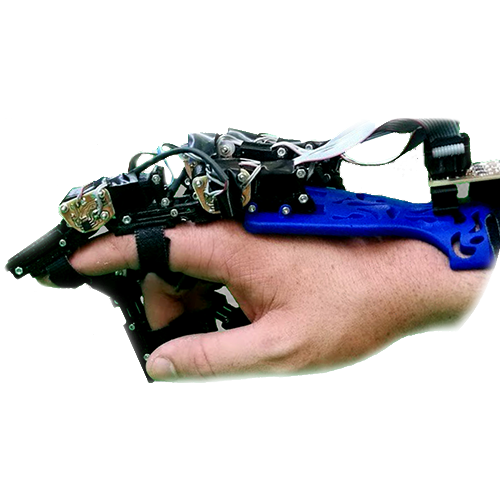
The Handex Exoskeleton Therapy Hand is a rehabilitation device created with the purpose of helping people regain their fingers strength and mobility, following a spinal cord injury, stroke or other medical condition that results in the loss of finger mobility. In some of these cases, several arm muscles are still functional, and their activity can be sensed and translated through the exoskeleton into movement.
Project description
The Exoskeleton Therapy Hand that was designed has two modes, auto mode and manual mode. In the auto mode, when an EMG trigger is sensed, the exoskeleton will guide the patient’s hand in a full fist flexion, followed by full extension and ending in the relaxed position of the hand. In the manual mode, the exoskeleton will be controlled by two buttons on the main PCB: one button flexes all fingers, while the other extends them. An additional serial mode will allow sending commands from the computer to the microcontroller using UART communication. These commands will be converted by the microprocessor into movements of the exoskeleton.
Project results
At the end of the project, the manual mode is fully functional and all the modules are working separately. A recommendation for the future would be to ensure a good connection between the modules, an efficient PCB design that would minimize power loses, as well as switching to a stronger material for the brace itself. If this is assured, the muscle sensing can be implemented as well.
Since this BeCreative project was a big success, the team won the HTSM award at the Engineering in Practice Symposium in July 2019. Furthermore, a follow-up project was executed after the summer holidays in the 2019/220 academic year (see link below).

Videos
Follow-up project: