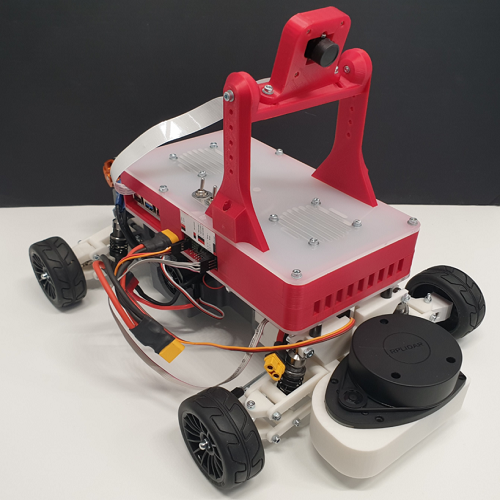
This project aims to create a small-scale (1:10) electrically powered car, which will serve as a platform for future student teams to research, develop and test self-steering solutions. The car will be equipped with various sensors, software, and mechanical solutions that are essential for autonomous technology. Our platform will allow students to understand the complexity of self-steering technolgy and develop innovative solutions to improve performance and safety of autonomous vehicles.
Project results
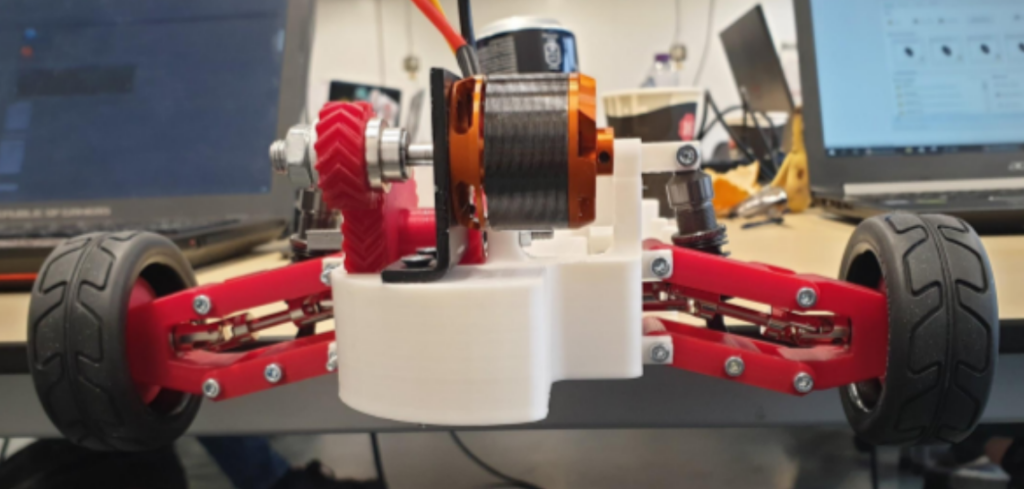
The project team was able to successfully design and build a rolling chassis, provide the necessary electronic hardware and structure, and develop the software to control the car’s speed and direction of movement.
The car that we built was able to detect objects and track the boundaries of the race track, maintain a constant speed when a loadwas connected, and travel at least 400m without running out of energy. The car was also able to drive on multiple surface types.
Despite serious technical challenges encountered during the project, such as difficulties with the lidar detecting certain materials, the team was able to overcome them and create a largely finished self steering car.
The final product meets the functional and non-functional requirements set out by the client, and the team is confident that the car could be easily reproduced by future engineering students. Overall, the project was a success and served as a valuable learning experience for the team.